Multibody Dynamics Library for 2D and 3D Multibody Systems
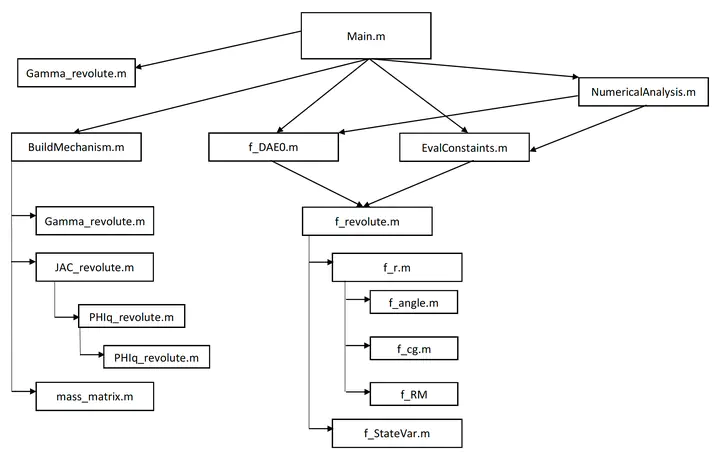
The primary motivation to develop a multibody dynamics library is different systems with different parameters can be simulated using the same library. This eliminates the need for specialized codes for individual problems. For example, different codes have to be developed for the simulation of a double pendulum and an excavator. But, once the library is developed, both the systems can be simulated using the same library. The library was developed using Matlab. This project gave an intuition about how multibody dynamics simulation softwares like Adams work.
Sai Tej Paruchuri
Postdoctoral Research Associate in Plasma Control
My research interests include plasma control, dynamics and controls, vibrations and adaptive structures, data-driven modeling.