Nonlinear Control of Robotic Manipulator
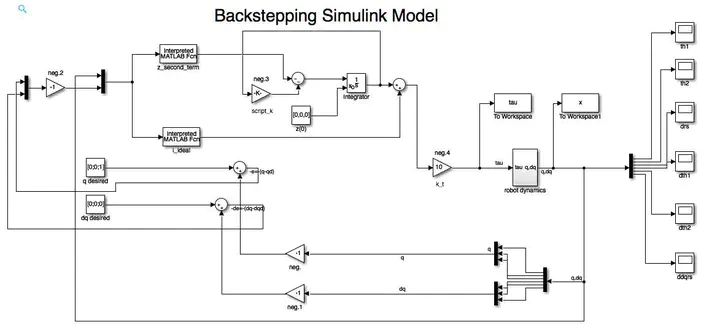
Designed and simulationed (using MATLAB) sliding mode and backstepping controllers for a serial robotic manipulator.
Sai Tej Paruchuri
Postdoctoral Research Associate in Plasma Control
My research interests include plasma control, dynamics and controls, vibrations and adaptive structures, data-driven modeling.